1.Eip新增5500系列的驅動器,請直接搜尋該型號。

2.新增一個Motion Group

3.雙擊進入設定頁面(同上圖)
4.設定對應的驅動器

5.設定馬達型號

6.設定單位mm/inch/deg,馬達轉一圈多少距離5mm


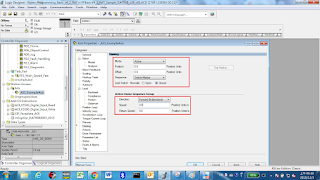
7.設定原點方式,單波(Bi-directional)雙波(Uni-directional),要不要抓Z相marker。
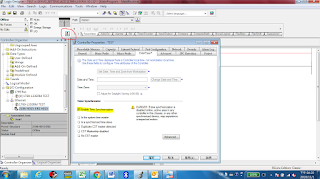
8.連線download至PLC
9.Auto tuning

10.Manual tuning

11.試運轉











 |
設定IP與名稱  |
2.新增一個Motion Group

3.雙擊進入設定頁面(同上圖)
4.設定對應的驅動器

5.設定馬達型號

6.設定單位mm/inch/deg,馬達轉一圈多少距離5mm


7.設定原點方式,單波(Bi-directional)雙波(Uni-directional),要不要抓Z相marker。

Bi-directional:碰到DOG sensor會反彈後找到Z相停止。
Uni-directional:碰到Dog sensor會在向前走後找到Z相停止。
Mode:Active或Passive
Active就是下達MAM指令後,直接驅動伺服動作。
Passive則是下達MAM指令後,須配合其他裝置動作完觸發DOG後回原點。
9.Auto tuning

10.Manual tuning

11.試運轉

其他
*馬達的動力線與編碼線隔離網要記得固定在驅動器上,不然會發回授信號異常!
*驅動器送電,DC Bus要先有電,之後再送AC才不會發FLT S25異常。






補充STO接線


Cycle寫法


pre_DI_1_config_Value -->5 (原本10) NG
pre_DI_1_config_Value -->6 OK
_ServoAxis.PositiveOvertravelInputStatus 硬體實際為負極限
Relay不ON使用極限偵測
Relay ON使用原點偵測
------------------------------------------------------------
pre_DI_2_config_Value -->6 (原本5) NG
pre_DI_2_config_Value -->5 OK
_ServoAxis.NegativeOvertravelInputStatus 硬體實際為正極限
1.要回原點時要設定pre_DI_1_config_Value(10)/pre_DI_2_config_Value(5)
2.回完原點要設定pre_DI_1_config_Value(6)/pre_DI_2_config_Value(5)
留言
張貼留言